Sommario
|
Premessa |
Elementi costituenti della sezione |
Verifica a collasso di sezione presso-inflessa |
Procedura numerica di verifica |
Sperimentazione numerica |
Riferimenti bibliografici |
La verifica di resistenza allo stato limite ultimo di sezioni presso-inflesse è un problema tipico nella progettazione di strutture intelaiate in cemento armato. Dato il numero ridotto di variabili coinvolte, il problema è semplice sul piano computazionale ma deve essere ripetuto su un gran numero di sezioni e sollecitazioni diverse (migliaia di volte, per strutture di media complessità). La disponibilità di procedure numeriche di verifica realmente efficienti e robuste, riveste quindi un certo interesse.
Vi è anche da considerare che il comportamento di elementi in C.A. è condizionato da dettagli, quali il confinamento offerto dalla armatura trasversale, le autotensioni iniziali dovute alla maturazione ed al ritiro del calcestruzzo, le deformazioni e le fessurazioni presenti all'inizio del processo di carico e le modalità di evoluzione di quest'ultimo. Questi dettagli sono tuttavia generalmente poco rilevanti ai fini degli obbiettivi primari della verifica, legati alla sicurezza statica dell'opera e comunque una attenzione eccessiva verso modellazioni dettagliate contrasta con la mancanza delle informazioni necessarie. Tutto ciò spinge, come anche suggerito dagli Eurocodici [1], all'uso di metodi di verifica anche molto semplificati ma capaci di fornire valutazioni affidabili della sicurezza a collasso della struttura.
Procedure di soluzioni basate su modellazioni "a fibra", che operano mediante integrazione numerica del legame σ - ε su un fitto insieme di punti, come pure procedure più efficienti, ad integrazione analitica, introducono un eccessivo ed inutile livello di dettaglio che non vanno certo in questa direzione. Il problema merita quindi una qualche attenzione (vedi ad es. [2,3,4,5]).
Comportamento reologico del C.A. confinato
Il comportamento reologico del calcestruzzo confinato è stato oggetto di una ampia ed approfondito investigazione e la sua modellazione può considerasi ormai consolidata. Aspetti quali la deformazione a compressione ultima, la resistenza di picco e la deformazione corrispondente, sono ben caratterizzati e direttamente utilizzabili (vedi [6,7,8]). I diversi modelli proposti in letteratura concordano su questi dati anche quando presentano forti differenze nella modellazione del comportamento post-picco.
Valori del 1.5-2.5% per la deformazione ultima del calcestruzzo possono essere facilmente ottenuti con un adeguato dimensionamento dell'armatura trasversale [9,10], raggiungendo anche il 5% per calcestruzzi ben confinati. Analogamente valori del 16-20% sono tipici nei moderni acciai per armatura. In queste condizioni (vedi [11]), descrivere le tensioni al limite ultimo nel calcestruzzo con un diagramma parabola rettangolo invece che assumere un valore limite costante, come pure una modellazione articolata delle diverse fasi (lineare elastica, fessurazione, snervamento, ultima) rappresenta un inutile manierismo.
Questi dettagli, potevano avere senso con i valori convenzionali molto cautelativi (0.35% per il calcestruzzo e 2% per l'acciaio) utilizzati in passato. Tuttavia, dati i valori effettivi di deformazione attualmente accessibili, è del tutto ininfluente ai fini della resistenza ultima della sezione in quanto comporta nel diagramma solo una piccola differenza in termini di area, peraltro concentrata nelle vicinanze dell'asse neutro.
In effetti, il riferirsi alle sole tensioni limite non solo comporta una semplificazione nelle formule da utilizzare ma anche permette sfruttare una grande varietà di risultati teorici e di metodologie di analisi sviluppate nella teoria della plasticità.
Sollecitazioni limite sulla sezione
L'ipotesi usuale di conservazione delle sezioni piane permette di ricondurre la deformazione plastica incrementale della sezione a 3 parametri scalari  rispettivamente deformazione assiale e curvature nelle direzioni
rispettivamente deformazione assiale e curvature nelle direzioni  e
e  nel piano della sezione, Risulta:
nel piano della sezione, Risulta:

Corrispondentemente, la risposta limite della sezione è definita dai tre scalari  ,
,  ed
ed  , rispettivamente sforzo assiale e momenti flettenti lungo le direzioni e . Risulta
, rispettivamente sforzo assiale e momenti flettenti lungo le direzioni e . Risulta
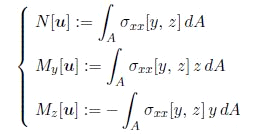
essendo  la tensione normale limite agente nel punto
la tensione normale limite agente nel punto  della sezione.
della sezione.
Se raccogliamo questi parametri nei vettori
dove la tensione normale è definita in funzione del valore della deformazione  la legge di flusso plastico fornisce
la legge di flusso plastico fornisce
dove  sono i valori della tensione di snervamento del materiale, rispettivamente a trazione ed a compressione.
sono i valori della tensione di snervamento del materiale, rispettivamente a trazione ed a compressione.
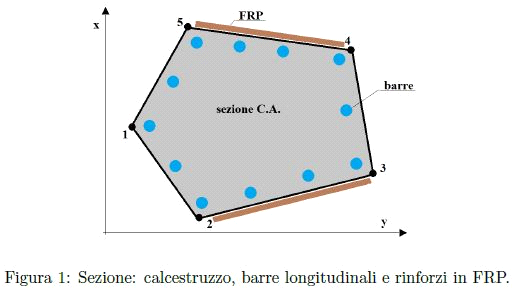
La sezione si assume composta da una matrice di calcestruzzo, da barre longitudinali e staffe trasversali in acciaio e da rinforzi a lamina in metallo o in materiale composito (FRP).
Si assume una eguale resistenza a trazione e compressione nell'acciaio ma la sola resistenza a compressione nel Cls e la sola a trazione nelle lamine in FRP.
La sezione è descritta assegnando:
1. la sezione in Cls, poligonale e definita dalla posizione  dei vertici;
dei vertici;
2. le barre longitudinali in acciaio, di posizione  e diametro
e diametro  ;
;
3. i rinforzi aggiuntivi a lamina, in metallo o FRP, individuati dagli estremi  ed
ed  e dallo spessore
e dallo spessore  .
.
La risultante delle tensioni sulla sezione è calcolata come somma dei contributi delle barre, dei rinforzi a lamina e del calcestruzzo collaborante. I singoli contributi sono ottenuti integrando la tensione normale agente  sull'area interessata.
sull'area interessata.
Contributo del calcestruzzo alla risultante
Il contributo del calcestruzzo richiede l'integrazione sul dominio 2D della sezione collaborante  , e può essere ottenuta mediante integrale di contorno, come proposto in [12]. Per una sezione poligonale di
, e può essere ottenuta mediante integrale di contorno, come proposto in [12]. Per una sezione poligonale di  lati
lati  di normale esterna
di normale esterna  , vale infatti la formula generale:
, vale infatti la formula generale:

Indicando con  gli estremi del lato
gli estremi del lato  -esimo, in sequenza antioraria, si ottiene
-esimo, in sequenza antioraria, si ottiene

dove
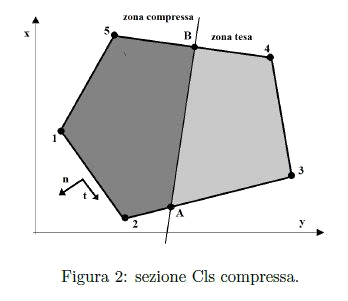
Nel caso di sezione parzializzata, la sommatoria va ovviamente estesa alla sola zona compressa (nel caso di fig.2 individuata dai vertici { 1,2,A,B,5}).
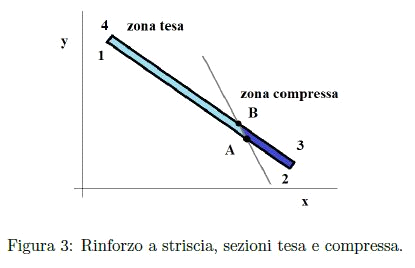
Il contributo delle strisce di rinforzo, è messo in conto in modo del tutto analogo, sempre mediante le formule generali. Anche in questo caso, se l'asse neutro taglia la sezione del rinforzo, questa deve essere separata nelle parti tesa e compressa (in fig.3 {1,A,B,4} e {A,2,3,B}) su cui in agisce una diversa tensione limite. Si ricorda che, nel caso di FRP, spesso si assume la sola tensione limite a trazione.
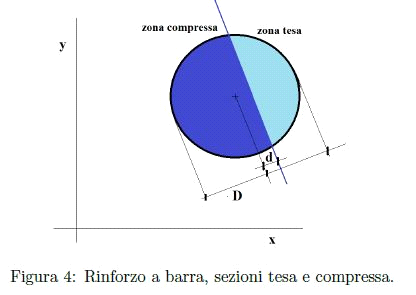
I rinforzi a barre sono gestiti in modo analogo, separando se necessario le due zone tesa e compressa, come indicato in fig. 4. Il contributo alla sollecitazione è calcolato in forma chiusa in base alla posizione dell'asse neutro e al rapporto  .
.
Con l'ipotesi usuale di conservazione delle sezioni piane, la verifica a collasso di una sezione soggetta ad una sollecitazione di presso-flessione  consiste nel risolvere il problema di analisi limite
consiste nel risolvere il problema di analisi limite

dove  il fattore di sicurezza a collasso, è il valore nominale della sollecitazione esterna agente,
il fattore di sicurezza a collasso, è il valore nominale della sollecitazione esterna agente,  la risposta limite della sezione, funzione del meccanismo plastico
la risposta limite della sezione, funzione del meccanismo plastico  , e
, e  la generica variazione ammissibile di quest'ultimo:
la generica variazione ammissibile di quest'ultimo:
essendo
dove la tensione normale è definita in funzione del valore della deformazione  attraverso la legge di flusso. La verifica si assume soddisfatta se
attraverso la legge di flusso. La verifica si assume soddisfatta se  .
.
Risposta limite della sezione
La posizione dell'asse neutro, definito implicitamente dalla \eqref{eq:01a} assume un ruolo importante nel calcolo della risposta s u in quanto permette di separare la sezione in due zone a tensione costante, la tesa  e la compressa .
e la compressa .
Effettuata la separazione, la risposta può essere ricavata mediante l'integrazione della tensione sull'area interessata. In particolare, il contributo del calcestruzzo e delle lamine in FRP, entrambi assunti a comportamento monolatero, sono valutati sulle sole zone reagenti, compressa per il Cls e tesa per gli FRP. Utilizzando le formule di integrazione \eqref{eq:01b}, si ottiene:
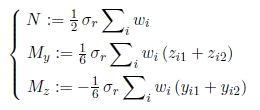
dove le sommatorie sono estese a tutti i lati di contorno della zona e  è la resistenza di calcolo corrispondente. Il contributo delle barre di armatura è ottenuto con con formule analitiche per la sezione circolare.
è la resistenza di calcolo corrispondente. Il contributo delle barre di armatura è ottenuto con con formule analitiche per la sezione circolare.
Nel caso di lamine o barre non attraversate dall'asse neutro, la formula si banalizza nella

In ogni caso l'integrazione viene effettuata in forma è esatta. Non è conveniente infatti assumere come infinitesimo lo spessore della lamina o il diametro della barra in quanto ciò introduce discontinuità nella risposta all'attraversamento dell'asse neutro e difficoltà di convergenza al processo di soluzione, oltre che inutili errori nei risultati.
Descrizione del problema in sole due variabili
Il vettore  dipende in effetti solo dalla direzione di e non dalla sua ampiezza. Tenendo conto di ciò, il problema \eqref{eq:03a} può essere convenientemente riscritto in termini di vettori 3D normalizzati mediante l'equazione
dipende in effetti solo dalla direzione di e non dalla sua ampiezza. Tenendo conto di ciò, il problema \eqref{eq:03a} può essere convenientemente riscritto in termini di vettori 3D normalizzati mediante l'equazione

in termini dei versori

che rende esplicita la presenza di sole due incognite indipendenti. Una volta che questa sia risolta, il fattore  è ricavato dal rapporto di normalizzazione
è ricavato dal rapporto di normalizzazione

Ridursi ad un problema in due variabili, dalle 4 di partenza ( ,
,  ,
,  e
e  ) è sicuramente un vantaggio che è tuttavia raggiunto solo se si riesce a descrivere in modo efficiente i vettori in gioco, tutti contenuti in una sfera 3D unitaria, in termini di punti
) è sicuramente un vantaggio che è tuttavia raggiunto solo se si riesce a descrivere in modo efficiente i vettori in gioco, tutti contenuti in una sfera 3D unitaria, in termini di punti  del piano 2D.
del piano 2D.
Come è ben noto, mappare la sfera su un piano non è privo di inconvenienti. La soluzione più semplice, ottenuta linearizzando la sfera a partire da un suo punto $\vu_0$ mediante la proiezione sul piano tangente:

dove $\vv_1$ e $\vv_2$ sono versori che formano insieme ad $\vu_0$ una terna ortonormale:

tende a distorcere la metrica locale e si rivela accettabile solo in un intorno ristretto di $\vu_0\,$ ($||\Delta\vu|| \ll ||\vu_0||$). Una mappatura più articolata in coordinate geografiche latitudine e longitudine, all'allontanarsi dall'equatore, distorce la metrica falsando le distanze e diventa inutilizzabile all'avvicinarsi ai poli.
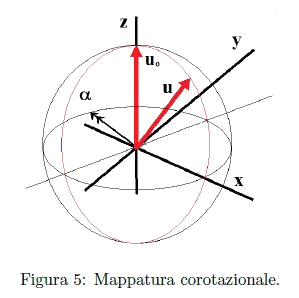
Mappatura corotazionale
E' conveniente utilizzare una mappatura corotazionale in cui il vettore $\vu$ è ottenuto, come illustrato in figura, ruotando il versore $\bi_z$ dell'asse $z$ attorno ad un asse contenuto nel piano $x,\,y$ di un angolo antiorario $\alpha$. In presenza di rotazioni finite questa rappresenta infatti la scelta più appropriata \cite{Garcea-Madeo-Zagari-Casciaro-2009} e si rivela conveniente anche nel nostro caso.
L'algebra che governa le rotazioni, anche se operativamente semplice, potrebbe risultare poco familiare al lettore. Ricordiamo qui di seguito i suoi principali operatori: il \emph{prodotto vettore}, il \emph{vettore rotazione}, la \emph{matrice spin} e la \emph{matrice di rotazione}.
Prodotto vettore Il prodotto vettore $\vw := \{w_x,\,w_y,\,w_z\} = \vu \times \vv$ tra due vettori $\vu:=\{u_x,\,u_y,\,u_z\}$ e $\vv:=\{v_x,\,v_y,\,v_z\}$ è definito dalla:
\begin{subequations}
e corrisponde ad un vettore ortogonale al piano contenente $\vu$ e $\vv$, orientato secondo la regola della mano destra. Il vettore definisce una rotazione che allinea $\bu$ a $\bv$ ed individua sia l'asse di rotazione, dato dalla direzione di $\vw$ che il valore $\alpha$ della rotazione antioraria attorno ad esso, definito dalla relazione
Vettore rotazione L'angolo $\alpha$ e il versore $\bi_\alpha$ dell'asse di rotazione sono entrambi definiti dal \emph{vettore rotazione} $\balf$ attraverso le relazioni
$\balf$ è collegato al prodotto vettore $\bw:=\bu \times \bv$ attraverso la relazione

Ovviamente, essendo $\arcsin(w)/w = 1 + w^2/6 + w^4\,3/40 + \cdots$, risulta

Matrice di spin La matrice spin $\bW[\balf]$ è la matrice antisimmetrica definita dal vettore rotazione $\balf:=\{\alpha_x,\,\alpha_y,\,\alpha_z\}$ attraverso le relazioni
Risulta

Come si vedrà più avanti, lo spin contiene l'informazione al primo ordine per la matrice di rotazione $\vR$.
Matrice di rotazione La matrice di rotazione $\vR[\valf]$ è l'ente più importante nella gestione delle rotazioni. E` definita in funzione del vettore rotazione $\valf$ dalla formula di Rodrigues:

Si dimostra che $\vR$ è una matrice unitaria, che cioè risulta

Si dimostra inoltre che la sua espansione in serie di Taylor è data dalla

per cui,

La matrice di rotazione fornisce il mezzo più comodo per gestire le rotazioni. Infatti il vettore $\vu_r$ ottenuto ruotando $\vu$ di $\valf$ è dato da
Due rotazioni successive, $\vR[\balf]$ seguita da $\vR[\bbet]$ si combinano con la regola del prodotto.
Variazioni della rotazione - Ovviamente, la combinazione di due rotazioni non è commutativa: $\vR[\valf,\,\vbet] \neq \vR[\vbet,\,\valf]$. La non commutatività complica l'espressione della variazione $\delta\vR$ conseguente ad una variazione $\delta\balf$ della rotazione, Si deve infatti distinguere l'ordine con cui sono applicate le rotazioni $\vR[\valf]$ ed $\vR[\delta\valf]=\vI+\vW[\delta\valf]$: in particolare, se l'incremento $\delta\valf$ preceda o segua $\valf$. Nel primo caso, spesso chiamata \emph{variazione materiale}, si ha

Nel secondo, chiamata \emph{variazione spaziale}, si ha invece

La differenza fra le due variazioni consiste nel diverso significato che assume il vettore $\delta\valf$ che nel primo caso ($\delta\valf_o$) è inteso espresso nel riferimento iniziale e nel secondo ($\delta\valf_{\alpha}$) in quella già ruotato di $\valf$. Si ha pertanto

La variazione spaziale $\delta\vR_\alpha \alpha$, si presta meglio alla descrizione del moto rigido di sistemi articolati ed è la più conosciuta (spesso l'unica) in quanto largamente utilizzata in ingegneria meccanica e nell'industria dei robot.
La variazione materiale $\delta\vR_o$ è tuttavia la sola fra le due ad essere in accordo con la rappresentazione di Rodrigues \eqref{eq:09a} che richiede che entrambe le rotazioni $\valf$ e $\delta\valf$ siano intese nel riferimento iniziale (vedi anche \cite{Argyris-1985}). E` quindi quella da utilizzare nel nostro contesto.
Il meccanismo plastico $\bhu$ è descritto mediante la mappatura corotazionale

e pertanto la sua variazione diventa

La eq.\eqref{eq04}, che definisce il problema della verifica, può quindi essere scritta come

che, ponendo

può essere riscritta nella forma

Risulta, ovviamente, $\alpha_x = \delta\alpha_x = \beta_x = 0$. La condizione \eqref{eq:10c} può essere quindi condensata nella forma

L'equazione può essere risolta mediante iterazioni alla Newton:

Soluzione con metodo Quasi-Newton a metrica variabile
Il metodo di Newton (o Newton-Raphson) utilizzato nella (10g) richiede la costruzione della matrice Hessiana inversa
che risulta sensibilmente onerosa sul piano computazionale. Inoltre, la sua convergenza è assicurata solo se si resta in un intorno della soluzione cercata o se si mettono in atto strategie aggiuntive di controllo del passo (\emph{line-minimization}, \emph{false step}, ecc$\dots$), anche queste onerose. Ciò rende poco conveniente lo schema di Newton rispetto ai metodi \emph{Quasi-Newton} a \emph{metrica variabile} che operano secondo lo schema

del tutto simile a quello di Newton ma utilizza una opportuna approssimazione $\vhH_j$ dello Hessiano inverso $\vH_j\,$.
Lo schema procede aggiornando man mano la stima corrente della soluzione $\vq_j$ e il corrispondente valore del gradiente $\vg_j$ ed insieme viene anche aggiornata l'approssimazione corrente dello Hessiano $\vtH_j$ in modo da rispettare la condizione secante

Sono ovviamente possibili diverse scelte di dettaglio per definire la correzione $\Delta\vtH_j$ e queste caratterizzano le diverse varianti del metodo ma quelle più interessanti possono ancora ritenersi quella di Fletcher e Powell \cite{Fletcher-Powell-1963} e quella di Broyden \cite{Broyden-1965} oltre quella iniziale di Davidon \cite{Davidon-1959} (per maggiori informazioni vedi \cite{Press-Teukolsky-Vetterling-Flannery-2007}).
La verifica di una sezione per una assegnata condizione di carico resta comunqque un problema semplice ma il fatto che nell'ambito della stessa analisi strutturale finisca col dover essere ripetuto migliaia di volte, con sezioni e condizioni di carico diverse, ne rende necessaria l'ottimizzazione algoritmica.
L'analisi è stata condotta tre metodi a metrica variabile, il metodo di Fletcher e Powell \cite{Fletcher-Powell-1963}, il metodo di Broyden \cite{Broyden-1965} nella versione nota \emph{Broyden-Fletcher-Godfarb-Shanno}, nella implementazione riportata in \cite{Press-Teukolsky-Vetterling-Flannery-2007} ed il metodo di Davidon nella versione implementata in \cite{Casciaro-1975}. Questi metodi sono spesso accompagnati da una opzione aggiuntiva di \emph{line-minimization}
L'indagine ha abbracciato 96328 verifiche con forme di sezione condizioni di carico diverse, ma tutte relative a casi concreti di pratica professionale. Ciascuna verifica è affrontata con schemi di aggiornamento diversi, senza \emph{line-minimization} ma introducendo al suo posto un controllo (max $0.05\;rad$) sulla lunghezza del passo.
Come ci si poteva aspettare, data la relativa semplicità del problema e la regolarità della mappatura adottata, l'opzione \emph{line-minimization} si è rivelata inutile ed il processo arriva a convergenza con un numero ridotto di iterazioni, spesso meno di 15 e solo raramente sopra le 30, anche se si usa una tolleranza restrittiva ($1.0^{-5}$). Nell'implementazione adottata, il metodo di Broyden si è rivelato il più robusto dei tre.

tavola 1: numero di processi terminati entro [x] iterazioni
[1] CEN. EN 1998-1: 2004 Eurocode 8: Design of structures for earthquake resistance - Part 1: General rules, seismic actions and rules for buildings. European Committee for Standardization, 2004.
[2] G. Alfano, F. Marmo, and L. Rosati. An unconditionally convergent algorithm for the evaluation of the ultimate limit state of rc sections subject to axial force and biaxial bending. International Journal for Numerical Methods in Engineering, 72, 2007.
[3] L. Rosati, F. Marmo, and R. Serpieri. Enhanced solution strategies for the ultimate strength analysis of composite steel-concrete sections subject to axial force and biaxial bending. Computer Methods in Applied Mechanics and Engineering, 197, 2008.
[4] F. Marmo and L. Rosati. Analytical integration of elasto-plastic uniaxial constitutive laws over arbitrary section. International Journal for Numerical Methods in Engineering, 91, 2012.
[5] F. Marmo and L. Rosati. The fiber-free approach in the evaluation of the tangent stiffness matrix for elastoplastic uniaxial constitutive laws. International Journal for Numerical Methods in Engineering, 94, 06 2013.
[6] CEN. EN 1992-1: 2004 Eurocode 2: Design of concrete structures. European Committee for Standardization, 2004.
[7] J.B. Mander, M.J. Priestley, and R. Park. Observed stress-strain behavior of con ned concrete. Journal of Structural Engineering (United States), 114:1827{1849, 1988.
[8] J.B. Mander, M.J. Priestley, and R. Park. Theoretical stress-strain model for confined concrete. Journal of Structural Engineering, 114:1804{1826, 1988.
[9] L. Bing, R. Park, and H. Tanaka. Constitutive behavior of high-strength concrete under dynamic loads. ACI Structural Journal, 97:619{629, 2000.
[10] M.M. Karthik and J.B. Mander. Stress-block parameters for unconfined and confined concrete based on a unified stress-strain model. Journal of Structural Engineering, 137:270{273, 2011.
[11] S. Sessa, F. Marmo, L. Rosati, L. Leonetti, G. Garcea, and R.Casciaro. Evaluation of the capacity surfaces of reinforced concrete sections: Eurocode versus a plasticity-based approach. Meccanica, 11 2017.
[12] A. S. Petrolo; R. Casciaro. 3d beam element based on Saint Venant’s rod theory. Computers & Structures, 82, 2004.
[13] G. Garcea; A. Madeo; G. Zagari; R. Casciaro. Asymptotic post-buckling fem analysis using corotational formulation. International Journal of Solids and Structures, 46, 2009.
[14] R. Fletcher; M.J.D. Powell. A rapidly convergent descent method for minimization. The Computer Journal, 6, 08 1963.
[15] C. G. Broyden. A class of methods for solving nonlinear simultaneous equations. Mathematics of Computation, 19, 10 1965.
[16] William C. Davidon. Variable metric method for minimization. Technical Report ANL-5990 Rev. Physics and Mathemetics - AEC Research and Development Reports, Argonne national Laboratory, Lemont, Illinois (USA), November 1959.
[17] William H. Press; Saul A. Teukolsky; William T. Vetterling; Brian P. Flannery. Numerical Recipes: The Art of Scientific Computing. Cambridge University Press, 3rd edition, 2007.
[18] R. Casciaro. Time evolutional analysis of nonlinear structures. Meccanica, 10, 09 1975